Назначение
Высокоточные роботизированные решения для взаимодействия с образцами и определения их характеристик в нанометровом масштабе. Благодаря уникальной технологии движения возможно позиционирование зондов с помощью роботизированных манипуляторов и поддержка стабильных электрических контактов. Высокая модульность решений обеспечивает значительную гибкость для глубокой интеграции с разнообразным микроскопическим и испытательным оборудованием, обеспечивая эффективные рабочие процессы измерения.
Описание
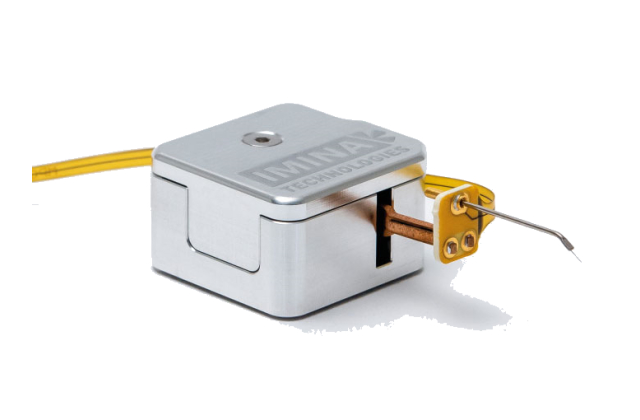
Основная технология Imina Technologies заключается в уникальной интеграции пьезоэлектрических приводов в манипулятор miBot™, самый компактный в мире робот с 4 степенями свободы и нанометровым разрешением позиционирования.
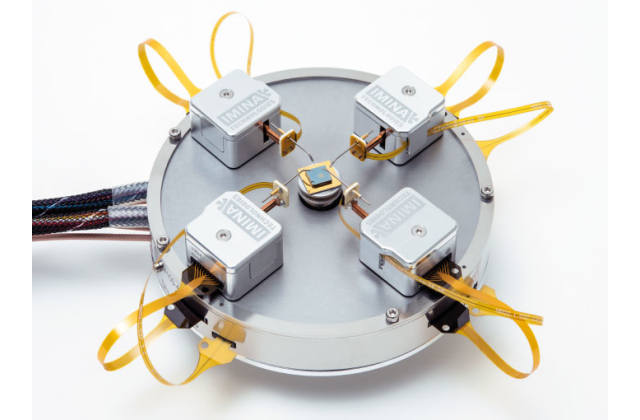
В отличие от традиционных манипуляторов, miBot является мобильным роботом. Он практически не привязан и может свободно перемещаться по поверхности предметного столика. Поскольку у него нет крепежных винтов, miBot можно грубо позиционировать вручную в произвольных положениях и естественным образом адаптировать к изменяющейся геометрии образцов и конфигурации микроскопа.
Различные рабочие режимы пьезоприводов обеспечивают диапазон перемещения до сантиметров с масштабируемым разрешением позиционирования от мкм до нм. Режим грубого позиционирования экономит время при приближении к интересующей области, а режим точного позиционирования обеспечивает точную контактную посадку зондов в месте назначения.
Применение
Роботизированные манипуляторы позволяют проводить измерение электрических свойств полупроводниковых устройств на самых маленьких технологических узлах, локализовать дефекты на уровне контактов и металлических линий повышая надежность полупроводниковых чипов. Также данные манипуляторы позволяют манипулировать отдельными микро и наночастицами изолируя их друг от друга, собирая вместе и подготавливать к дальнейшим исследования.
Технические характеристики роботизированных манипуляторов серии NANO
Степени свободы: 4, с независимым управлением по X, Y, R, Z
Габаритные размеры (ШхДхВ): 20,5×21,7×12,5 мм, плечо: 8,3 мм (без рабочего органа)
Вес: 12 г (без рабочего органа)
Макс. разрешение позиционирования в пошаговом режиме (грубом): 60 нм (X, Y), 120 нм (Z)
Макс. разрешение позиционирования в режиме сканирования (точном): 0,02 нм (X, Y), 0,1 нм (Z)
Диапазон перемещения:
- для пошагового режима (XY,R,Z): 20×20 мм2, ± 180°, 41°.
- для режима сканирования (X Y Z): 440×250×780 нм3
Примечание: в пошаговом режиме фактический диапазон X, Y, R ограничен размером и формой столика, на котором перемещаются роботы miBot, и длиной приводного кабеля.
Скорость: < 2,5 мм/с (X, Y), < 150 мрад/с (Z)
Силы и моменты: X и Y: толкающее усилие: 0,3 Н, Z: подъем: 0,7 мНм (5 г), зажим: 0,2 Н, зажим: 0,9 мНм (6 г)
Угол наклона: положение фиксации до 55°
Дрейф: < 1 нм/мин
Держатель зонда: набор держателей для зондов и оптоволокон
Электрическое зондирование
Диапазон напряжения: ± 100 В
Диапазон тока: 100 фА — 100 мА
Полоса пропускания: максимум 25 МГц
Сопротивление: прим. 3,5 Ом от наконечника зонда до соединительных фланцев